Through advanced autonomy testbed programs, NASA is setting the groundwork for one of its top priorities—the search for signs of life and potentially habitable bodies in our solar system and beyond. The prime destinations for such exploration are bodies containing liquid water, such as Jupiter’s moon Europa and Saturn’s moon Enceladus. Initial missions to the surfaces of these “ocean worlds” will be robotic and require a high degree of onboard autonomy due to long Earth-communication lags and blackouts, harsh surface environments, and limited battery life.
Technologies that can enable spacecraft autonomy generally fall under the umbrella of Artificial Intelligence (AI) and have been evolving rapidly in recent years. Many such technologies, including machine learning, causal reasoning, and generative AI, are being advanced at non-NASA institutions.
NASA started a program in 2018 to take advantage of these advancements to enable future icy world missions. It sponsored the development of the physical Ocean Worlds Lander Autonomy Testbed (OWLAT) at NASA’s Jet Propulsion Laboratory in Southern California and the virtual Ocean Worlds Autonomy Testbed for Exploration, Research, and Simulation (OceanWATERS) at NASA’s Ames Research Center in Silicon Valley, California.
NASA solicited applications for its Autonomous Robotics Research for Ocean Worlds (ARROW) program in 2020, and for the Concepts for Ocean worlds Life Detection Technology (COLDTech) program in 2021. Six research teams, based at universities and companies throughout the United States, were chosen to develop and demonstrate autonomy solutions on OWLAT and OceanWATERS. These two- to three-year projects are now complete and have addressed a wide variety of autonomy challenges faced by potential ocean world surface missions.
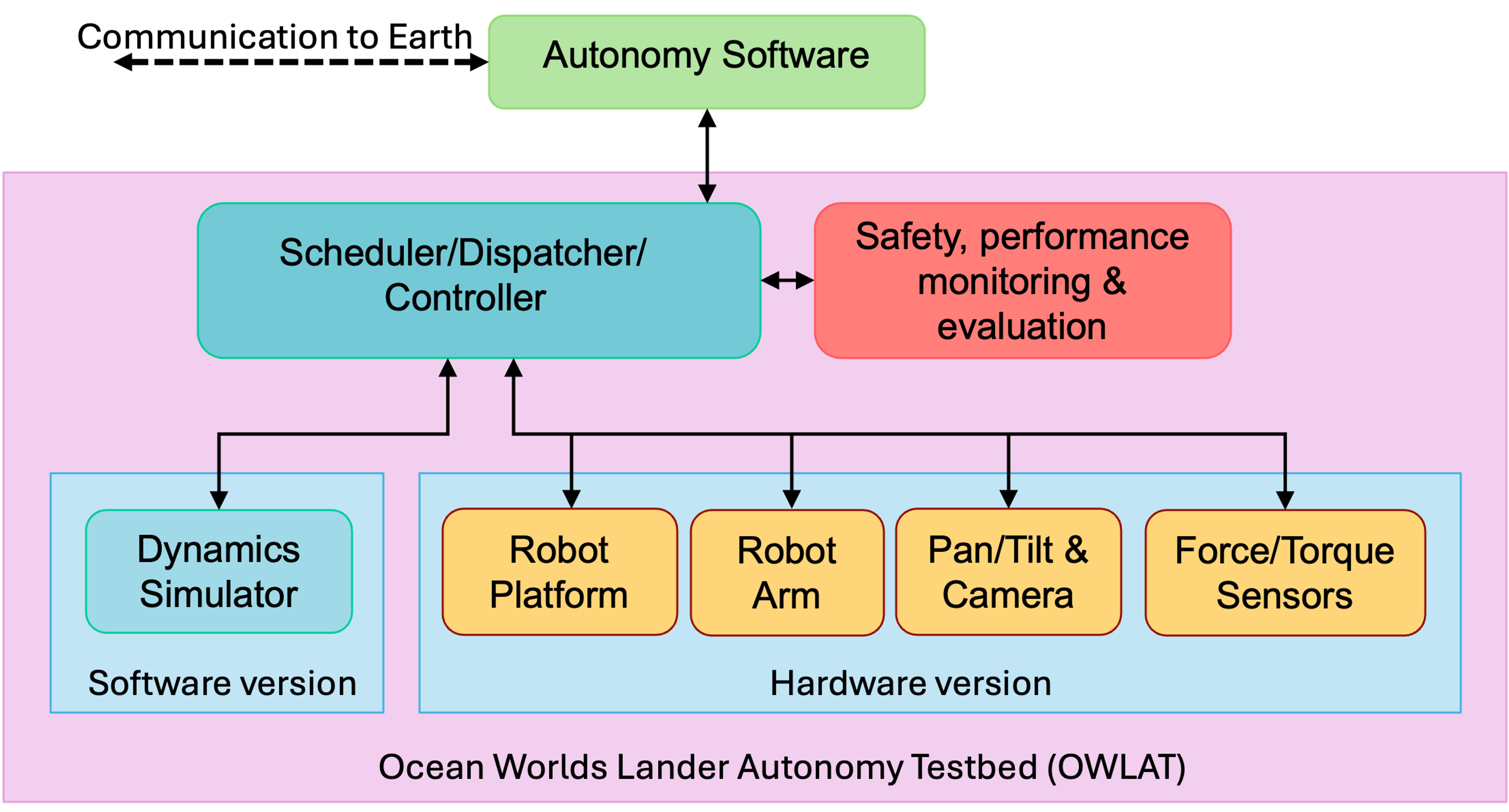
OWLAT is designed to simulate a spacecraft lander with a robotic arm for science operations on an ocean world body. The overall OWLAT architecture including hardware and software components is shown in Figure 1. Each of the OWLAT components is detailed below.
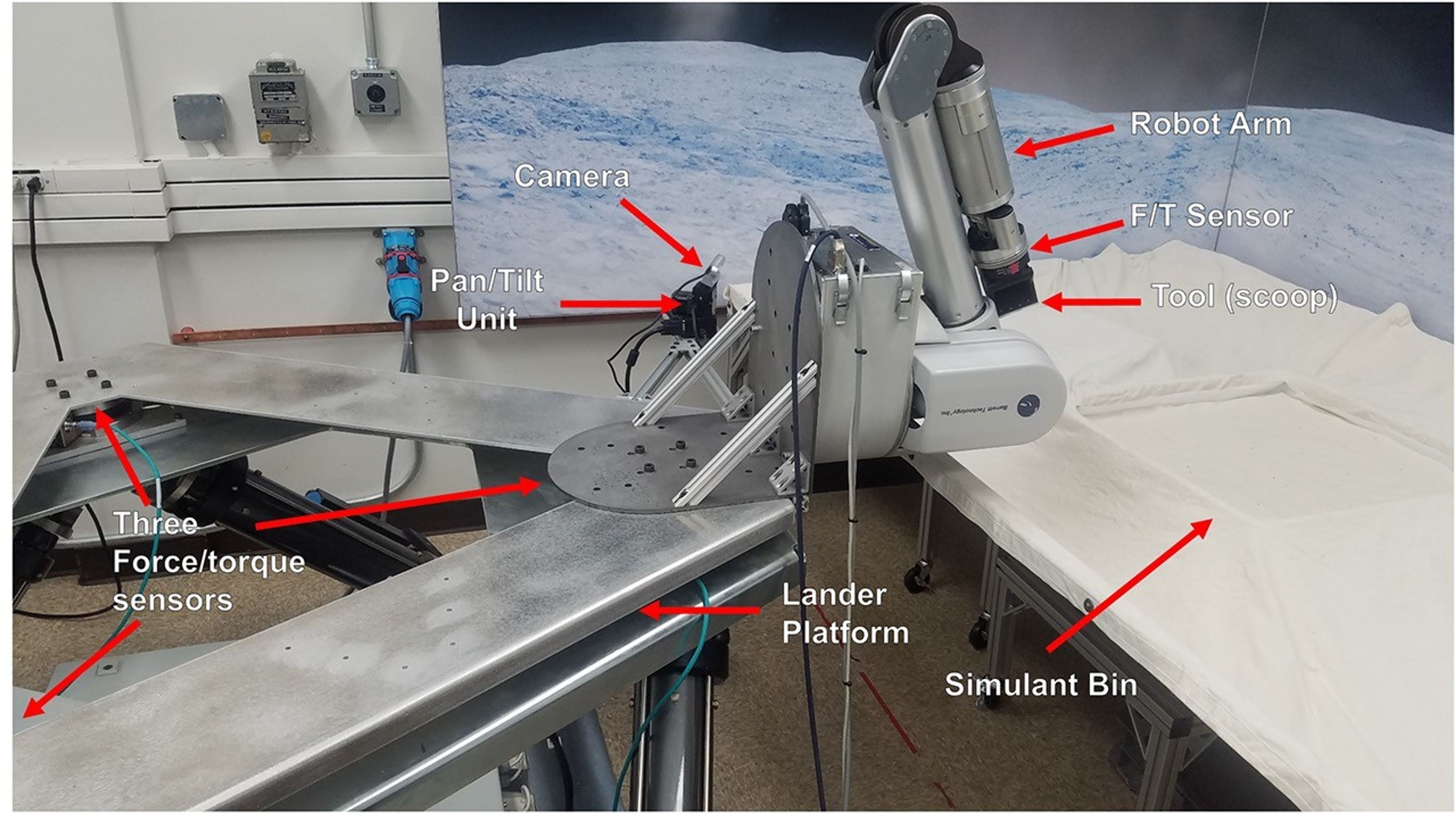
The hardware version of OWLAT (shown in Figure 2) is designed to physically simulate motions of a lander as operations are performed in a low-gravity environment using a six degrees-of-freedom (DOF) Stewart platform. A seven DOF robot arm is mounted on the lander to perform sampling and other science operations that interact with the environment. A camera mounted on a pan-and-tilt unit is used for perception. The testbed also has a suite of onboard force/torque sensors to measure motion and reaction forces as the lander interacts with the environment. Control algorithms implemented on the testbed enable it to exhibit dynamics behavior as if it were a lightweight arm on a lander operating in different gravitational environments.
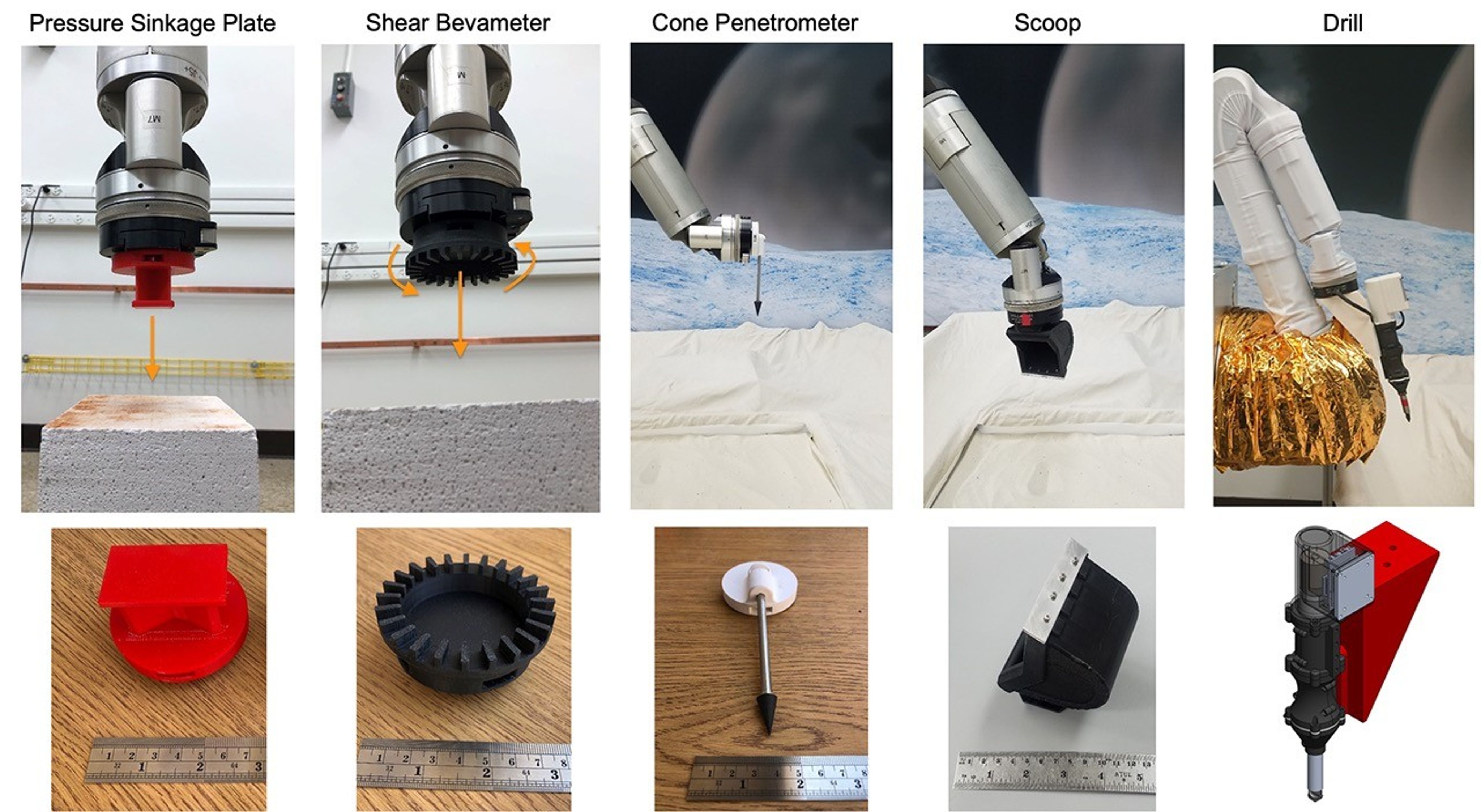
The team also developed a set of tools and instruments (shown in Figure 3) to enable the performance of science operations using the testbed. These various tools can be mounted to the end of the robot arm via a quick-connect-disconnect mechanism. The testbed workspace where sampling and other science operations are conducted incorporates an environment designed to represent the scene and surface simulant material potentially found on ocean worlds.
The software-only version of OWLAT models, visualizes, and provides telemetry from a high-fidelity dynamics simulator based on the Dynamics And Real-Time Simulation (DARTS) physics engine developed at JPL. It replicates the behavior of the physical testbed in response to commands and provides telemetry to the autonomy software. A visualization from the simulator is shown on Figure 4.
The autonomy software module shown at the top in Figure 1 interacts with the testbed through a Robot Operating System (ROS)-based interface to issue commands and receive telemetry. This interface is defined to be identical to the OceanWATERS interface. Commands received from the autonomy module are processed through the dispatcher/scheduler/controller module (blue box in Figure 1) and used to command either the physical hardware version of the testbed or the dynamics simulation (software version) of the testbed. Sensor information from the operation of either the software-only or physical testbed is reported back to the autonomy module using a defined telemetry interface. A safety and performance monitoring and evaluation software module (red box in Figure 1) ensures that the testbed is kept within its operating bounds. Any commands causing out of bounds behavior and anomalies are reported as faults to the autonomy software module.
OceanWATERS
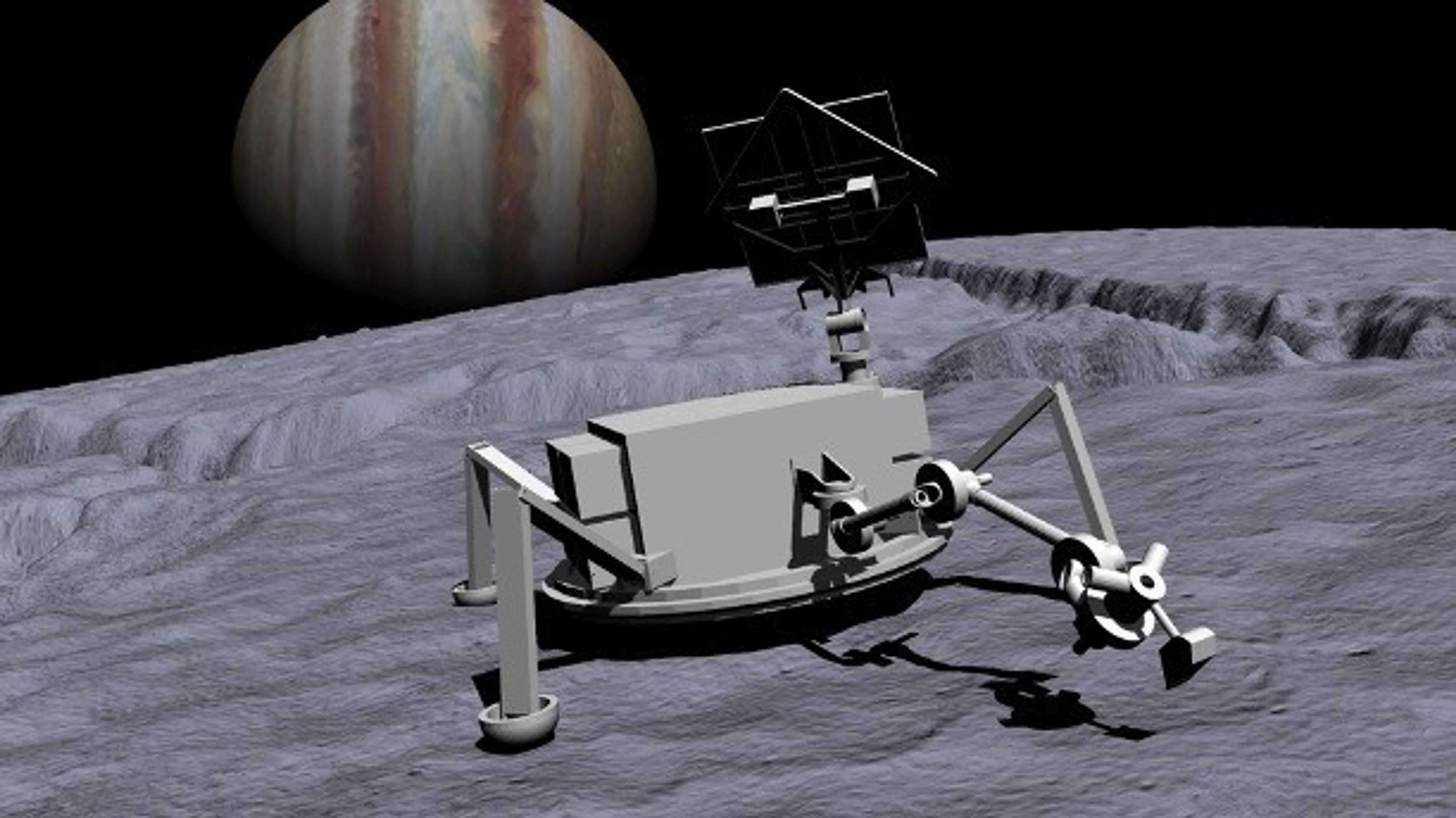
At the time of the OceanWATERS project’s inception, Jupiter’s moon Europa was planetary science’s first choice in searching for life. Based on ROS, OceanWATERS is a software tool that provides a visual and physical simulation of a robotic lander on the surface of Europa (see Figure 6). OceanWATERS realistically simulates Europa’s celestial sphere and sunlight, both direct and indirect. Because we don’t yet have detailed information about the surface of Europa, users can select from terrain models with a variety of surface and material properties. One of these models is a digital replication of a portion of the Atacama Desert in Chile, an area considered a potential Earth-analog for some extraterrestrial surfaces.
JPL’s Europa Lander Study of 2016, a guiding document for the development of OceanWATERS, describes a planetary lander whose purpose is collecting subsurface regolith/ice samples, analyzing them with onboard science instruments, and transmitting results of the analysis to Earth.
The simulated lander in OceanWATERS has an antenna mast that pans and tilts; attached to it are stereo cameras and spotlights. It has a 6 degree-of-freedom arm with two interchangeable end effectors—a grinder designed for digging trenches, and a scoop for collecting ground material. The lander is powered by a simulated non-rechargeable battery pack. Power consumption, the battery’s state, and its remaining life are regularly predicted with the Generic Software Architecture for Prognostics (GSAP) tool. To simulate degraded or broken subsystems, a variety of faults (e.g., a frozen arm joint or overheating battery) can be “injected” into the simulation by the user; some faults can also occur “naturally” as the simulation progresses, e.g., if components become over-stressed. All the operations and telemetry (data measurements) of the lander are accessible via an interface that external autonomy software modules can use to command the lander and understand its state. (OceanWATERS and OWLAT share a unified autonomy interface based on ROS.) The OceanWATERS package includes one basic autonomy module, a facility for executing plans (autonomy specifications) written in the PLan EXecution Interchange Language, or PLEXIL. PLEXIL and GSAP are both open-source software packages developed at Ames and available on GitHub, as is OceanWATERS.
Mission operations that can be simulated by OceanWATERS include visually surveying the landing site, poking at the ground to determine its hardness, digging a trench, and scooping ground material that can be discarded or deposited in a sample collection bin. Communication with Earth, sample analysis, and other operations of a real lander mission, are not presently modeled in OceanWATERS except for their estimated power consumption. Figure 7 is a video of OceanWATERS running a sample mission scenario using the Atacama-based terrain model.
Because of Earth’s distance from the ocean worlds and the resulting communication lag, a planetary lander should be programmed with at least enough information to begin its mission. But there will be situation-specific challenges that will require onboard intelligence, such as deciding exactly where and how to collect samples, dealing with unexpected issues and hardware faults, and prioritizing operations based on remaining power.
Results
All six of the research teams funded by the ARROW and COLDTech programs used OceanWATERS to develop ocean world lander autonomy technology and three of those teams also used OWLAT. The products of these efforts were published in technical papers, and resulted in development of software that may be used or adapted for actual ocean world lander missions in the future. The following table summarizes the ARROW and COLDTech efforts.
|
Principal Investigator (PI)
|
PI Institution
|
Project
|
Testbed Used
|
Purpose of Project
|
|
|
ARROW Projects
|
Jonathan Bohren
|
Honeybee Robotics
|
Stochastic PLEXIL (SPLEXIL)
|
OceanWATERS
|
Extended PLEXIL with stochastic decision-making capabilities by employing reinforcement learning techniques.
|
|
Pooyan Jamshidi
|
University of South Carolina
|
Resource Adaptive Software Purpose-Built for Extraordinary Robotic Research Yields (RASPBERRY SI)
|
OceanWATERS & OWLAT
|
Developed software algorithms and tools for fault root cause identification, causal debugging, causal optimization, and causal-induced verification.
|
|
|
COLDTech Projects
|
Eric Dixon
|
Lockheed Martin
|
Causal And Reinforcement Learning (CARL) for COLDTech
|
OceanWATERS
|
Integrated a model of JPL’s mission-ready Cold Operable Lunar Deployable Arm (COLDarm) into OceanWATERS and applied image analysis, causal reasoning, and machine learning models to identify and mitigate the root causes of faults, such as ice buildup on the arm’s end effector.
|
|
Jay McMahon
|
University of Colorado
|
Robust Exploration with Autonomous Science On-board, Ranked Evaluation of Contingent Opportunities for Uninterrupted Remote Science Exploration (REASON-RECOURSE)
|
OceanWATERS
|
Applied automated planning with formal methods to maximize science return of the lander while minimizing communication with ground team on Earth.
|
|
|
Melkior Ornik
|
U Illinois, Urbana-Champaign
|
aDaptive, ResIlient Learning-enabLed oceAn World AutonomY (DRILLAWAY)
|
OceanWATERS & OWLAT
|
Developed autonomous adaptation to novel terrains and selecting scooping actions based on the available image data and limited experience by transferring the scooping procedure learned from a low-fidelity testbed to the high-fidelity OWLAT testbed.
|
|
|
Joel Burdick
|
Caltech
|
Robust, Explainable Autonomy for Scientific Icy Moon Operations (REASIMO)
|
OceanWATERS & OWLAT
|
Developed autonomous 1) detection and identification of off-nominal conditions and procedures for recovery from those conditions, and 2) sample site selection
|
Acknowledgements: The portion of the research carried out at the Jet Propulsion Laboratory, California Institute of Technology was performed under a contract with the National Aeronautics and Space Administration (80NM0018D0004). The portion of the research carried out by employees of KBR Wyle Services LLC at NASA Ames Research Center was performed under a contract with the National Aeronautics and Space Administration (80ARC020D0010). Both were funded by the Planetary Science Division ARROW and COLDTech programs.
Project Leads: Hari Nayar (NASA Jet Propulsion Laboratory, California Institute of Technology), K. Michael Dalal (KBR, Inc. at NASA Ames Research Center)
Sponsoring Organizations: NASA SMD PESTO
